


Introducción al material PEEKSensores de robot
El PEEK (poliéter éter cetona) es un plástico de ingeniería especializado de alto rendimiento con propiedades como resistencia a altas temperaturas (temperatura de servicio a largo plazo de alrededor de 240 °C), resistencia a la corrosión química, alta resistencia, ligereza, bajo coeficiente de fricción y excelente aislamiento eléctrico. Estas ventajas lo convierten en un material ideal para componentes clave de sensores robóticos, solucionando las deficiencias de los sensores tradicionales de metal o plástico en términos de precisión, estabilidad y adaptabilidad ambiental.
I. Tipos y características de las aplicaciones principales
El material PEEK se utiliza principalmente para fabricar los componentes estructurales principales o los sustratos funcionales de los sensores. Sus aplicaciones más comunes son las siguientes:
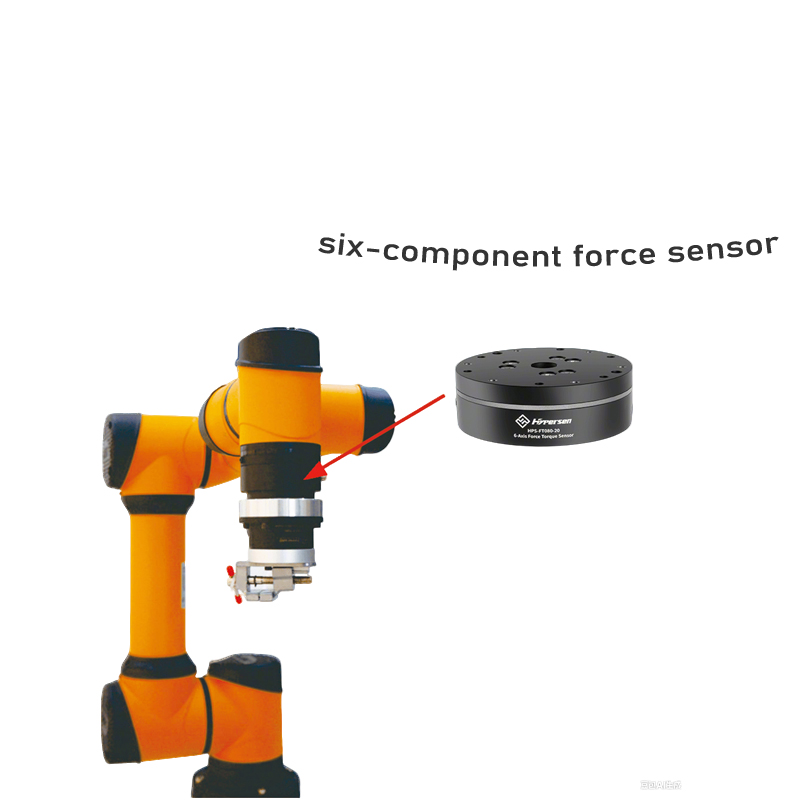
1. Sensores de fuerza/torque de seis dimensiones
Parte de aplicación: El cuerpo elástico (el componente principal para la percepción de la señal de fuerza) del sensor.
Valor principal: Los cuerpos elásticos tradicionales están hechos principalmente de aleación de aluminio, mientras que el PEEK tiene una mejor relación entre el módulo elástico y la densidad, lo que garantiza la resistencia estructural al tiempo que reduce significativamente la masa del cuerpo elástico, minimiza la interferencia inercial durante el movimiento del robot y mejora la precisión de la medición de fuerza (hasta ±0,1 % FS) y la velocidad de respuesta dinámica (tiempo de respuesta < 1 ms).
Escenarios típicos: ensamblaje de robots industriales (como control preciso de la fuerza de apriete de tornillos), interacción colaborativa entre humanos y máquinas de robots (como percepción de la fuerza de colisión), retroalimentación de fuerza quirúrgica de robots médicos (como monitoreo de la fuerza de pulido de la superficie ósea en robots ortopédicos).

2. Sensores táctiles/de tensión
Parte de aplicación: El sustrato flexible o portador de electrodos del sensor.
Valor fundamental: PEEK tiene cierta flexibilidad y resistencia a la fatiga, lo que le permite procesarse en formas delgadas o irregulares, adecuadas para escenarios de contacto curvos o flexibles, como dedos y pinzas de robot; al mismo tiempo, su aislamiento eléctrico puede evitar la interferencia de la señal, lo que garantiza la estabilidad de los datos táctiles (como la presión, el reconocimiento de textura) o de tensión (como la deformación de las articulaciones).
Escenarios típicos: Percepción de presión en robots de servicio al agarrar elementos frágiles (como vidrio, frutas), monitoreo de tensión para el ajuste en el ensamblaje flexible del robot industrial.
3. Sensores especializados para entornos corrosivos
Parte de aplicación: La carcasa, la funda de protección de la sonda o los componentes de contacto del sensor.
Valor principal: PEEK tiene una resistencia extremadamente fuerte a ácidos, álcalis, solventes orgánicos y vapor a alta temperatura (como la limpieza CIP en la industria alimentaria), muy superior al acero inoxidable o los plásticos comunes, protegiendo los componentes internos del sensor de la corrosión y extendiendo su vida útil.
Escenarios típicos: sensores de nivel/concentración de líquido en robots alimentarios/médicos (como el monitoreo del nivel de líquido en tanques de salsa), sensores de parámetros ambientales en robots químicos (como la protección de sondas de detección de gases corrosivos).
II. Principales ventajas sobre los materiales tradicionales

III. Campos de aplicación típicos
Robots industriales: Control de fuerza de montaje, retroalimentación de fuerza de rectificado, monitorización de presión de agarre;
Robots médicos: Percepción de fuerza de instrumentos quirúrgicos (como retroalimentación de fuerza en operaciones laparoscópicas), monitoreo de tensión articular de robots de rehabilitación;
Robots especiales: sensores ambientales resistentes a la corrosión en campos alimentarios y químicos, sensores de temperatura y fuerza en condiciones de alta temperatura (como soldadura automotriz).









